DRAGSENS Especificações
|
Estime a posição de um sensor arrastado com base na localização de um receptor GPS
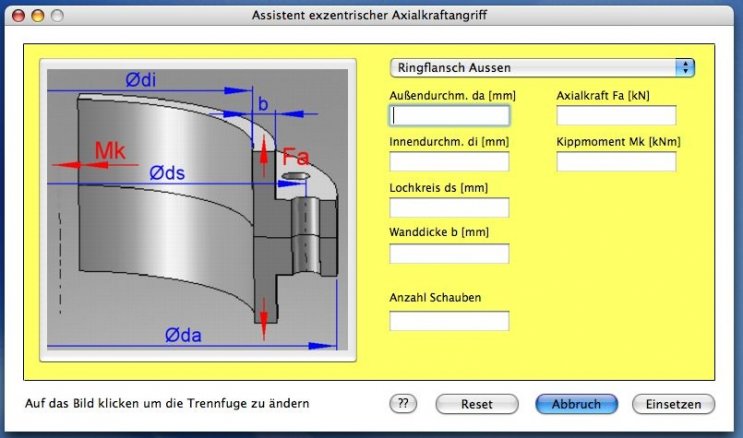
O software DRAGSENS Geo é usado para a estimativa da posição exata de um corpo rebocado, sensor, câmera, matriz ou rede, arrastado atrás de um navio, aeronave ou veículo. O software permite uma estimativa em tempo real da posição de um sensor arrastado com base na localização de um receptor GPS. O sensor, portanto, pode ser arrastado debaixo d'água, na superfície da água ou da terra ou por via aérea. O software calcula a posição do sensor ao longo da direção oposta ao curso por compensação da taxa de deriva, o rolamento e a capacidade de curva do veículo de reboque. DRAGSENS recebe dados de posição atual de uma sequência de GPS padrão (sequência de RMC). A partir dessas posições, ele calcula a média de um vetor de direção. Conhecendo o comprimento do cabo de reboque e a profundidade do sensor, a posição do sensor é estimada e emitida nos formatos quilométrico e geográfico. Coeficientes adequados ajudam a manter esta estimativa precisa, considerando, por exemplo, o cabo não como uma linha reta, mas como um arco parabólico.
Todas as cidades têm pontos de referência ou pontos de interesse que ajudam a identificá-los, e isso não deve ser esquecido