DRAGSENS Especificaciones
|
Estime la posición de un sensor arrastrado según la ubicación de un receptor GPS
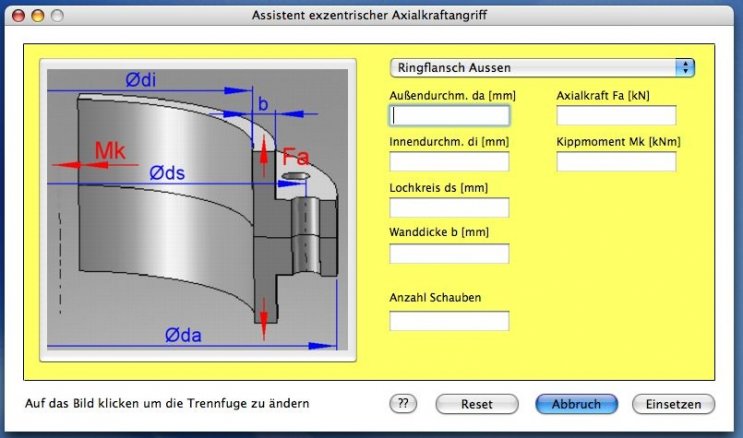
El software DRAGSENS Geo se utiliza para estimar la posición exacta de un cuerpo, sensor, cámara, matriz o red remolcados, arrastrados detrás de un barco, avión o vehículo. El software permite una estimación en tiempo real de la posición de un sensor arrastrado en función de la ubicación de un receptor GPS. De este modo, el sensor se puede arrastrar bajo el agua, en la superficie del agua o de la tierra o en el aire. El software calcula la posición del sensor a lo largo de la dirección opuesta al curso mediante la compensación de la velocidad de deriva, el balanceo y la capacidad de giro del vehículo tractor. DRAGSENS recibe datos de posición actual de una cadena de GPS estándar (cadena RMC). A partir de estas posiciones, promedia un vector de dirección. Conociendo la longitud del cable de remolque y la profundidad del sensor, la posición del sensor se estima y se emite en formatos tanto kilométricos como geográficos. Los coeficientes adecuados ayudan a mantener esta estimación precisa, considerando, por ejemplo, el cable no como una línea recta sino como un arco parabólico.
Todas las ciudades tienen hitos o puntos de interés que ayudan a identificarlas y que no se deben perder